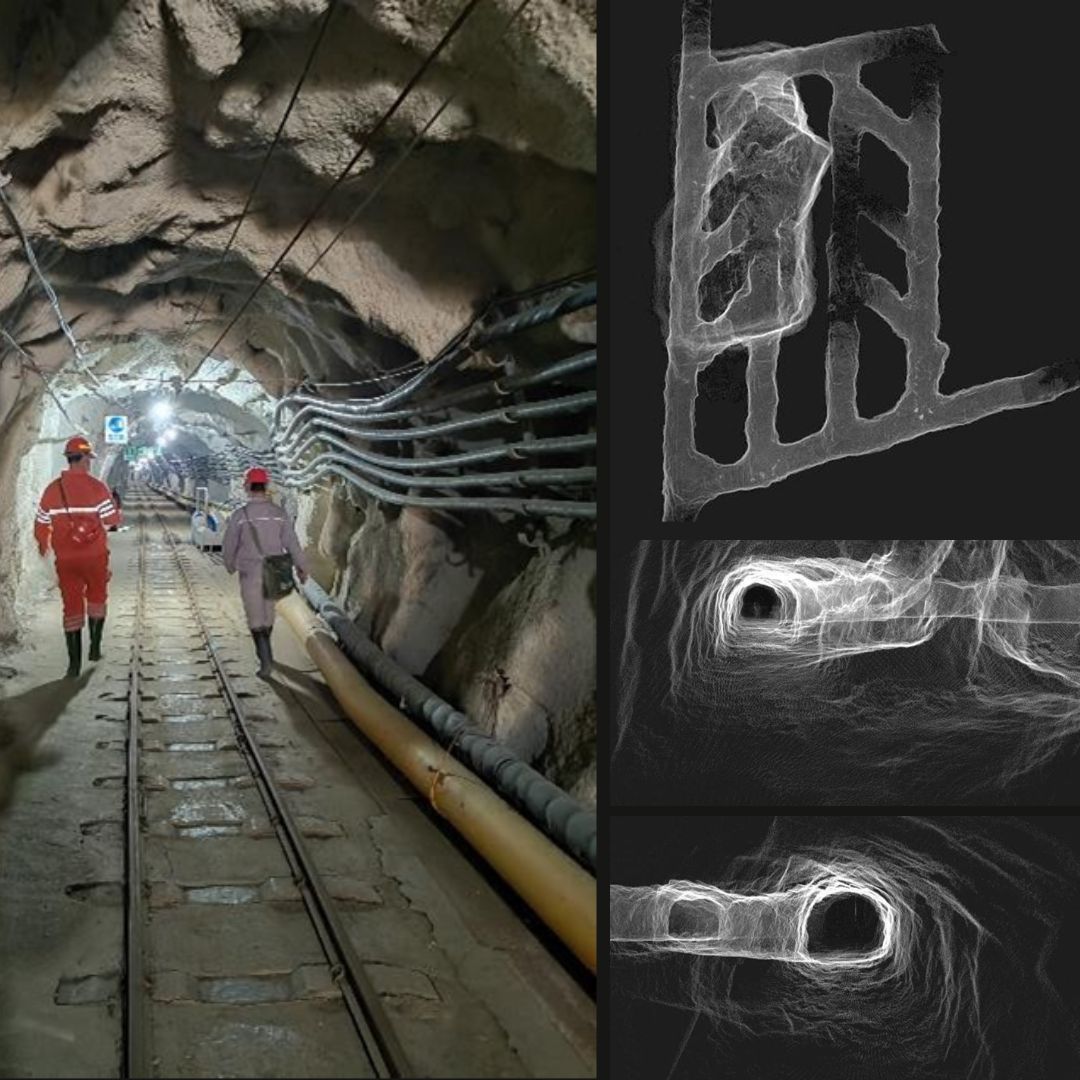
SLAM: Galerías y estructuras subterráneas en Minería Gallery SLAM: Galerías y estructuras subterráneas en Minería Escaneado SLAM, Geologia e hidrogeologia SLAM: Galerías y estructuras subterráneas en MineríaAltitudeco2024-02-05T13:49:24+00:00
SLAM aplicado a la minería de carbón Gallery SLAM aplicado a la minería de carbón Escaneado SLAM SLAM aplicado a la minería de carbónAltitudeco2024-02-05T13:03:55+00:00